Projects
SLAM (Simultaneous Localization and Mapping) and Particle Filter for localization
Demonstrated Point to Line Iterative Close Point scan match on occupancy grid map. Particle Filter for state estimation and map localization. Pure pursuit for locomotion.
Videos:
Pose Estimation, Scan Match Simulation Map generation using Hector SLAM
Autonomous Racing Reactive Navigation
Gap follow and Obstacle avoidance using Hokuyu 2D LIDAR. Reactive navigation in close loop college corridor ROS2 and C++. Wall follow and Follow-The-Gap algorithm
Videos:
Gap Follow Wall Follow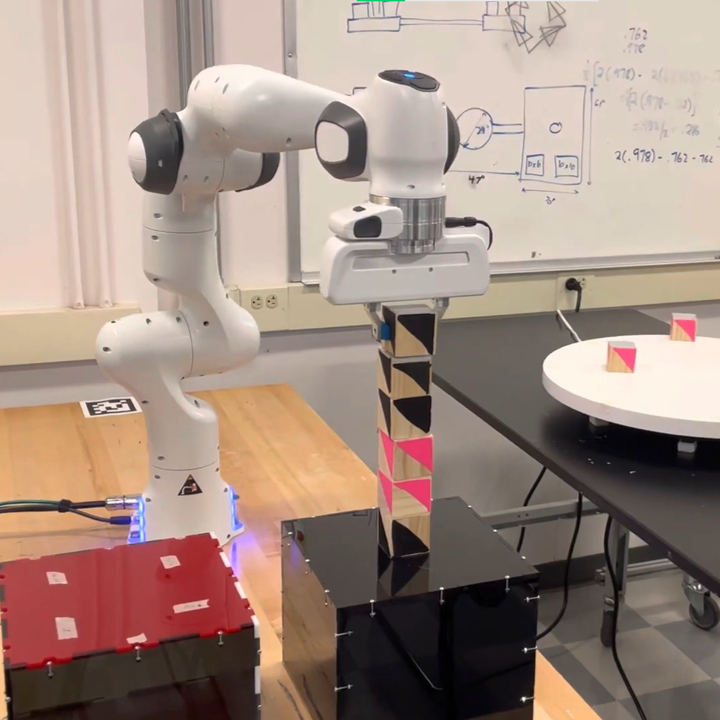
Pick and Place, Path Planning using A*, RRT for 7 DOF Robotic Arm
Solved the pick and place task for static and dynamic blocks. Rotations and translation using Homogeneous transformations. Implemented A* and RRT algorithms for the 7-dof Franka Emika PANDA robotic manipulator arm in ROS using Python.
Video
Autonomous Battle Robot
Designed and built an autonomous wall following robot. Localization using HTC Vive in C. Obstacle detection, frequency detection and wall following.